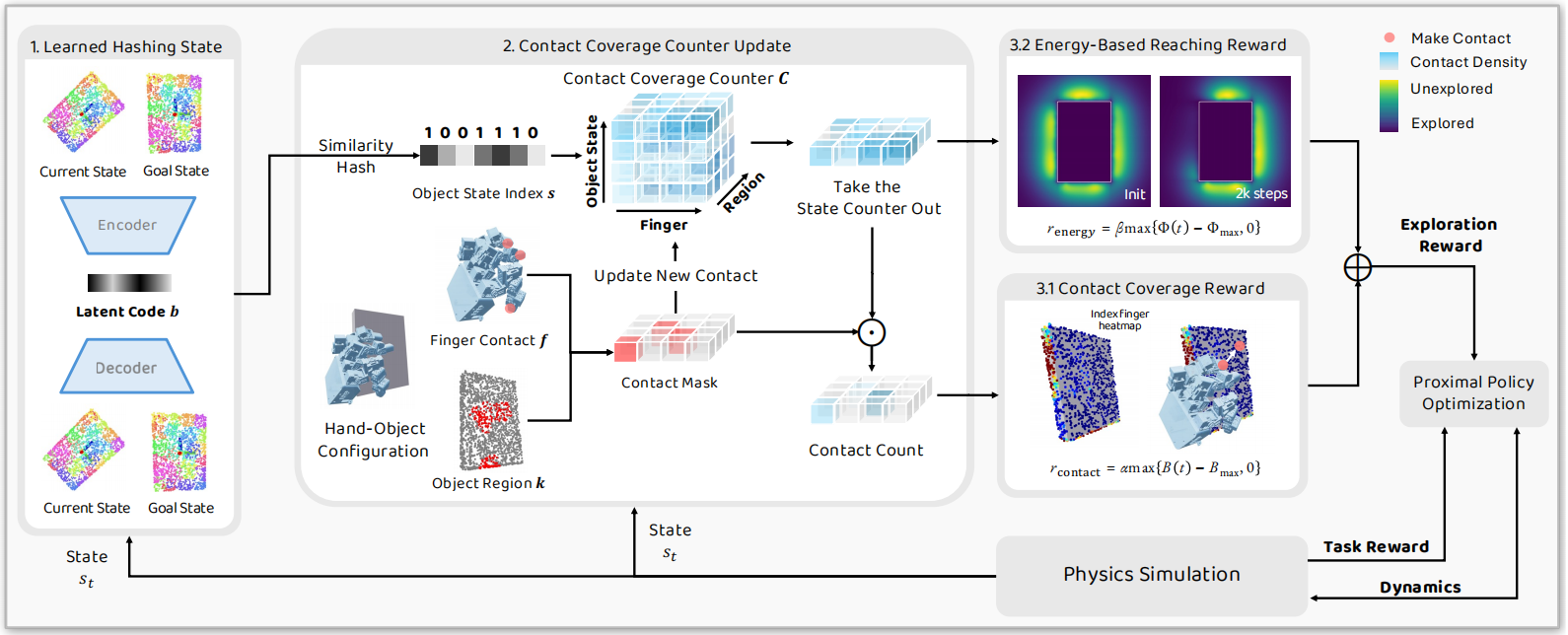
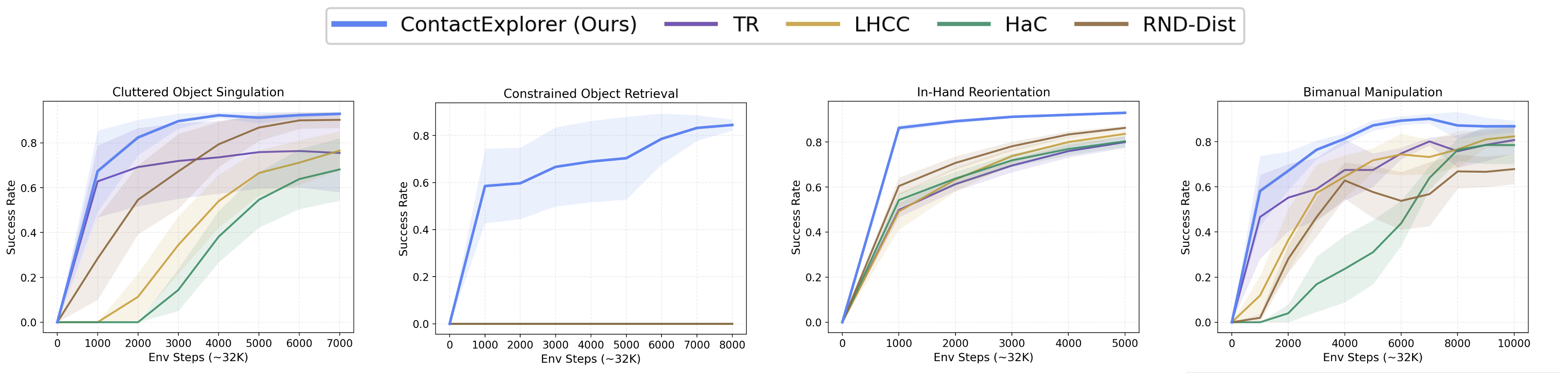
Deep Reinforcement Learning (DRL) has achieved remarkable success in domains with well-defined reward structures, such as Atari games and locomotion. In contrast, dexterous manipulation lacks general-purpose reward formulations and typically depends on task-specific, handcrafted priors to guide hand-object interactions. We propose ContactExplorer, a general exploration method designed for general-purpose dexterous manipulation tasks. ContactExplorer represents contact state as the intersection between object surface points and predefined hand keypoints, encouraging dexterous hands to discover diverse and novel contact patterns, namely which fingers contact which object regions. It maintains a contact counter conditioned on discretized object states obtained via learned hash codes, capturing how frequently each finger interacts with different object regions. This counter is leveraged in two complementary ways: (1) to assign a count-based contact coverage reward that promotes exploration of novel contact patterns, and (2) to provide an energy-based reaching reward that guides the agent toward under-explored contact regions. We evaluate ContactExplorer on a diverse set of dexterous manipulation tasks, including cluttered object singulation, constrained object retrieval, in-hand reorientation, and bimanual manipulation. Experimental results show that ContactExplorer substantially improves training efficiency and success rates over existing exploration methods, and that the contact patterns learned with ContactExplorer transfer robustly to real-world robotic systems.
Deep Reinforcement Learning (DRL) has achieved remarkable success in domains with well-defined reward structures, such as Atari games and locomotion. In contrast, dexterous manipulation lacks general-purpose reward formulations and typically depends on task-specific, handcrafted priors to guide hand-object interactions. We propose ContactExplorer, a general exploration method designed for general-purpose dexterous manipulation tasks. ContactExplorer represents contact state as the intersection between object surface points and predefined hand keypoints, encouraging dexterous hands to discover diverse and novel contact patterns, namely which fingers contact which object regions. It maintains a contact counter conditioned on discretized object states obtained via learned hash codes, capturing how frequently each finger interacts with different object regions. This counter is leveraged in two complementary ways: (1) to assign a count-based contact coverage reward that promotes exploration of novel contact patterns, and (2) to provide an energy-based reaching reward that guides the agent toward under-explored contact regions. We evaluate ContactExplorer on a diverse set of dexterous manipulation tasks, including cluttered object singulation, constrained object retrieval, in-hand reorientation, and bimanual manipulation. Experimental results show that ContactExplorer substantially improves training efficiency and success rates over existing exploration methods, and that the contact patterns learned with ContactExplorer transfer robustly to real-world robotic systems.